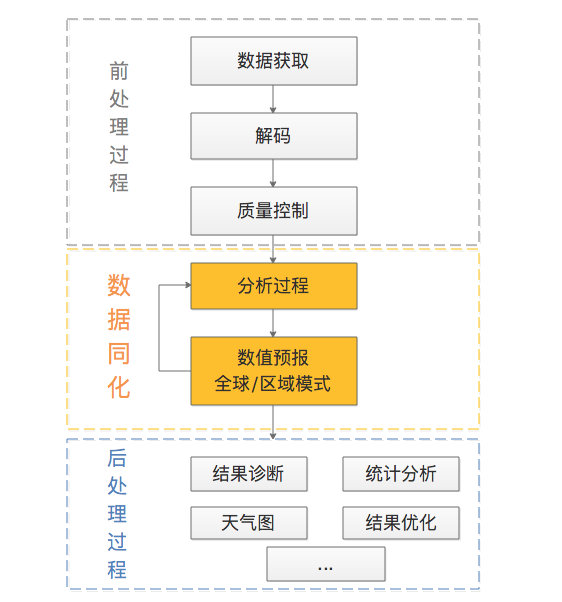
数据同化(Data Assimilation):在地球物理学领域,数据同化就是利用物理特性以及时间演变定律的一致性约束将观测信息加入到模式状态中的一种分析技术。简单的说:数据同化就是利用一系列约束条件将观测信息加到模式中,更改模式的初始状态和观测更为接近,来达到更好的预报效果。
数据同化通常分为两种形式:
序列化同化(sequential assimilation):这种形式的同化通常应用于实时同化系统,因为所采用的数据是过去一段时间到分析时刻的所有观测非序列化/回顾性同化(non-sequential/retrospective assimilation):这种形式的同化通常是应用于再分析数据的生成系统,因为这种方式所采用的观测数据包含了来自"未来"的数据。比如NCEP的FNL再分析数据,想生成2019.04.17 18UTC时刻的再分析数据,就要用到2019.04.17 18UTC之后以及之前的观测数据
状态向量x(State Vector):预报模式中,用于表示大气状态的矩阵。
真实状态(true state)(x_t):模式所能呈现的可能最好的状态,由于模式分辨率低于真实情况,分析是无法完全和真实状态一样的。注意:真实状态是未知量,而且是不可知量。
观测向量y(Observation Vector):由一系列观测数据所构成的矩阵。
控制向量(Control Variable):分析过程中所涉及到的变量。
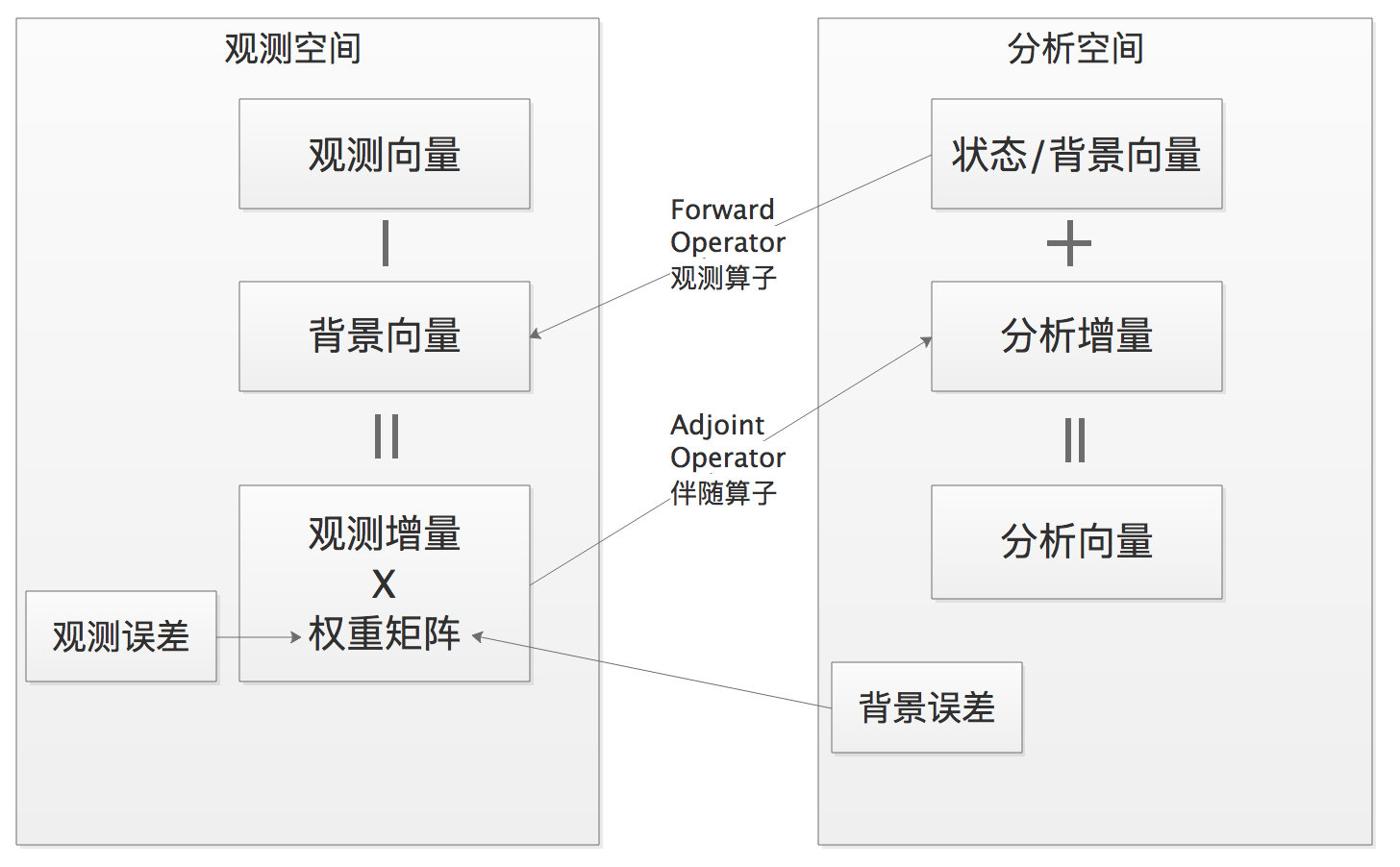
观测空间(Observation Space):控制变量空间(Control Variable Space)之一。主要是对观测数据进行处理。
分析空间(Analysis Space):控制变量空间之一。主要是根据背景状态向量和观测进行分析。
观测算子H(forward/observation operator):由于相对于模式数据而言,观测数据很少且分布不规则,为了对比观测和状态向量而引入,是将模式状态空间函数应用于观测空间,从而称为观测算子
变化量(innovation):观测和将背景场作用于观测算子后的差,即y - H(xb),这里的x是背景场向量
观测增量(Observation Increment):观测向量和背景向量的差,即y - x_b,而观测向量和背景向量之间进行比较需要利用观测算子进行变换,即y - H(x_b),因此观测增量和innovation是相同的
分析增量(Analysis Increment):分析向量和背景向量的差,即X_a - X_b,分析增量为观测增量和最优权重的乘积
分析残差(Analysis Residuals):观测向量和将分析场作用于观测算子后的差,即y - H(xa)
背景误差(Background Error):由于物理过程的简化等因素所造成的误差,即x_b - x_t
表示性误差(representativeness errors):由于模式离散化(model discretization)所造成的误差,因为模式的分辨率和实际情况也存在差异,也会存在误差。
观测误差(Observation Error):由于观测设备问题所导致的误差(设备误差(instrumental errors)),在分析过程的数学表达上,通常将表示性误差也划到观测误差中。即y - H(x_t)
分析误差(Analysis Error):分析向量和真实状态向量之间的差,即x_a - x_t
协方差(Covariance):衡量变量之间的总体误差
观测误差协方差矩阵(Observation Error Covariance Matrix):观测变量之间的误差矩阵
背景误差协方差矩阵(Background Error Covariance Matrix):模式变量之间的误差矩阵。对该矩阵的合理估计尤为重要。因为矩阵的大小和形状控制了分析增量的影响函数。形状决定了从观测到分析格点的信息的传播,大小决定了观测权重和背景权重的大小,当背景误差越大时,观测的权重越大。
分析误差协方差矩阵(Analysis Error Covariance Matrix):分析变量之间的误差矩阵
更新记录
2019.04.18 初次更新相关术语

